学習
学習 マルチモーダル学習:五感を活かすAI
私たちは、周りの世界を認識するために、視覚、聴覚、触覚、味覚、嗅覚といった様々な感覚を常に使っています。例えば、目の前にある果物を思い浮かべてみてください。その果物が熟しているかどうかを判断する時、私たちは見た目(色や形)だけでなく、香りや硬さといった複数の情報を組み合わせて判断しますよね。
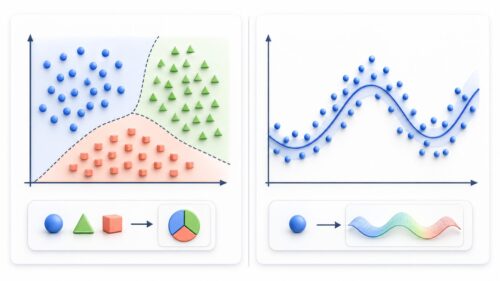
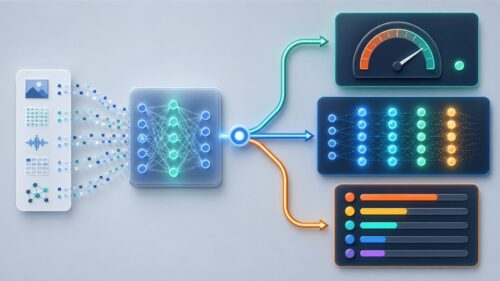
まさにこのような人間の認識方法を真似た技術が、複数の種類の情報を組み合わせる学習方法です。この方法では、写真や絵といった視覚情報、音声、文字情報など、異なる種類の情報を組み合わせて、コンピュータに物事をより深く理解させることができます。
例えば、従来の技術では、写真に写っている物体を認識することしかできませんでしたが、この新しい学習方法を使うことで、写真に写っている状況や物体の状態まで理解できるようになります。例えば、美味しそうな料理の写真を見て、見た目だけでなく、香りや味まで想像できるようになるのです。まるでコンピュータに五感を授けるように、複数の情報を組み合わせることで、一つだけの情報では分からなかった複雑な事柄も分析できるようになるのです。
さらに、この技術は、より人間に近い高度な推論を可能にします。例えば、ある人の表情や声の調子、話している内容といった複数の情報を組み合わせることで、その人の感情をより正確に理解できるようになります。これは、人間同士のコミュニケーションを円滑にするための重要な要素となります。
このように、複数の種類の情報を組み合わせる学習方法は、コンピュータに人間の認識能力に近づけるための重要な技術であり、今後の発展が期待されています。まるでコンピュータが私たちと同じように世界を理解できるようになる日も、そう遠くないかもしれません。