sim2realとは?シミュレーションから現実世界へAIを移す仕組みを解説

AIの初心者
「sim2real」は、シミュレーションで学習したAIを現実世界で使う考え方なんですよね。どうして最初から現実で学習させないのでしょうか?

AI専門家
現実のロボットや車で何度も失敗を試すと、費用も時間もかかり、故障や事故の危険もあるからだよ。まず仮想環境で練習させると、安全に多くの条件を試せるんだ。
AIの初心者
ロボットに荷物を運ばせる練習でも、現実なら場所や機材が必要ですし、失敗すると壊れるかもしれませんね。
AI専門家
その通り。sim2realでは、シミュレーションで十分に試したうえで現実へ移し、実機データを使って調整していく。時間と費用を抑えながら、現実で使えるAIに近づける方法なんだ。
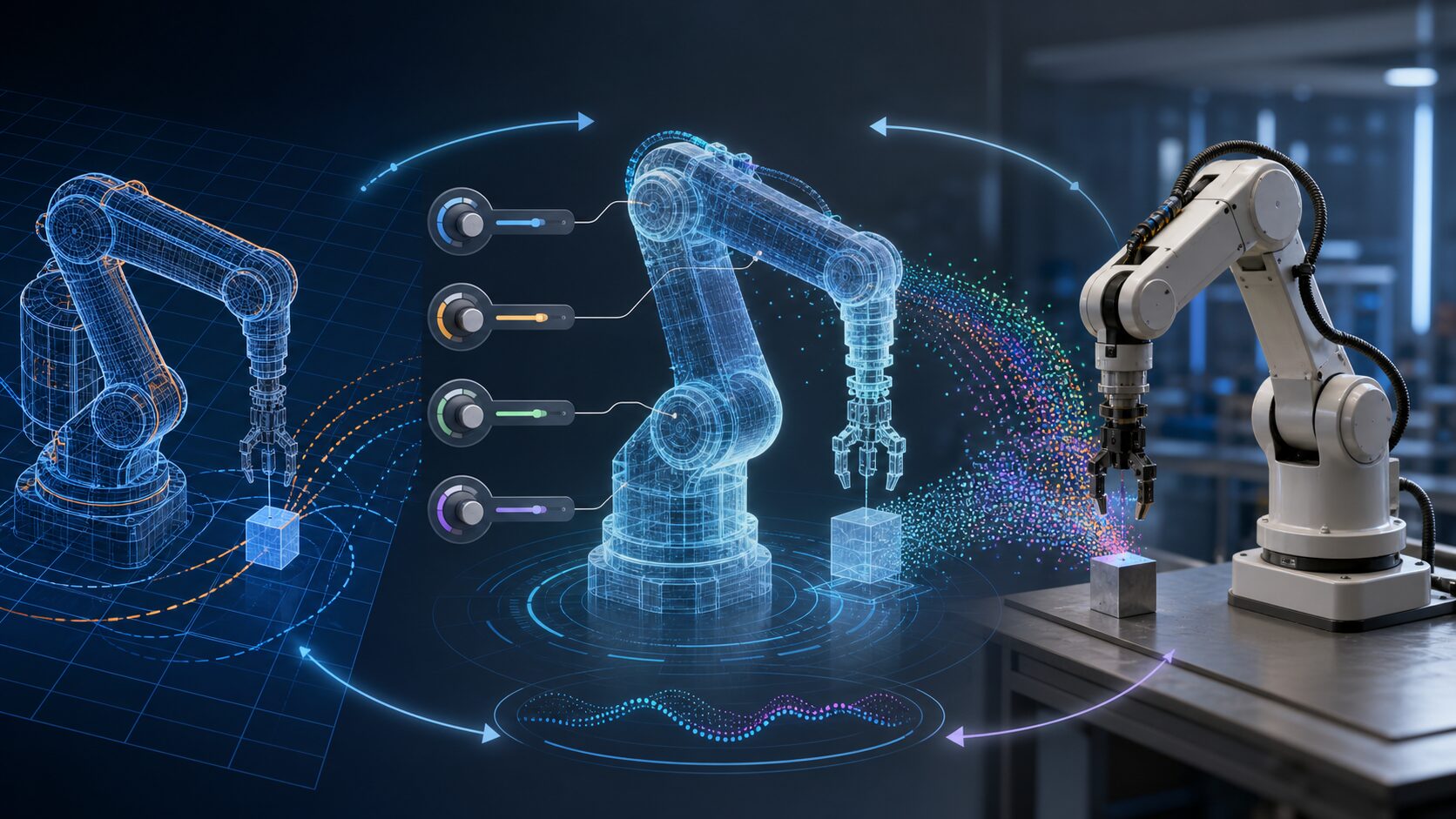
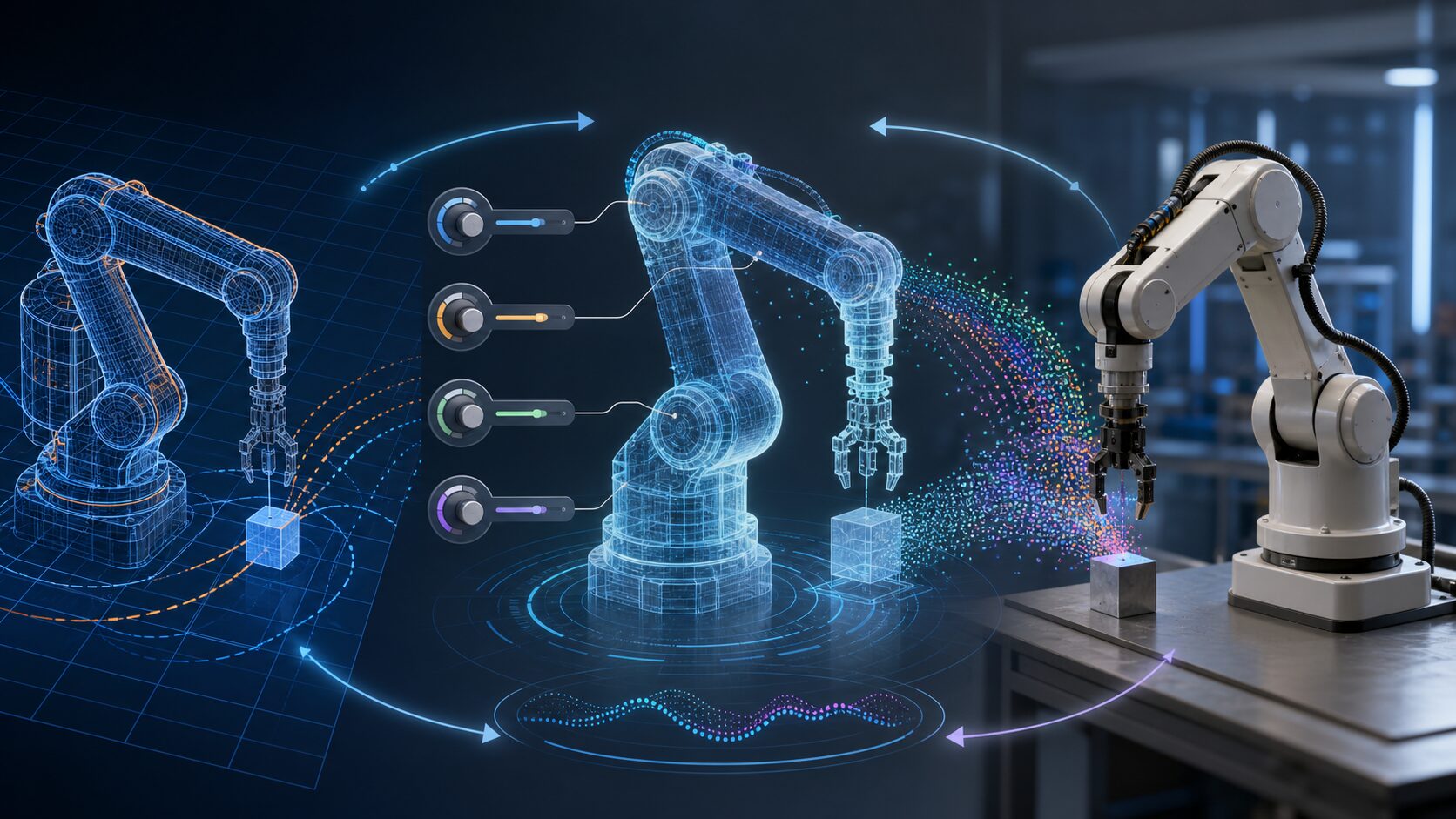
sim2real(シムトゥリアル)とは、シミュレーション環境で学習・検証したAIモデルや制御方法を、現実世界のロボット、自動車、ドローンなどで使えるようにする考え方です。特に、試行錯誤で行動を学ぶ強化学習や、ロボット制御、自動運転の開発でよく使われます。
現実世界でAIに何度も失敗を経験させると、機械の故障、事故、実験場所の確保、データ収集の手間が大きな問題になります。そこで、まずコンピューター上の仮想環境で安全に学習し、その結果を現実へ移すことで、開発を効率よく進めます。
sim2realとは何か
sim2realは、英語の「simulation to real world」を短くした表現です。直訳すれば「シミュレーションから現実へ」という意味で、仮想環境で得た学習結果を現実の環境で動かすための技術や考え方を指します。
たとえば、ロボットに箱を持ち上げて運ぶ動作を学習させたいとします。現実のロボットで最初から学習すると、箱を落としたり、アームをぶつけたり、センサーの設定を何度も変えたりする必要があります。一方、シミュレーションなら、ロボットの形、箱の重さ、床の摩擦、障害物の位置を仮想的に変えながら、何千回、何万回もの試行を短時間で行えます。
ただし、sim2realは「シミュレーションで成功したら、そのまま現実でも必ず成功する」という意味ではありません。現実には、摩擦の小さな違い、センサーのノイズ、部品のばらつき、照明の変化など、仮想環境では表しきれない要素があります。その差を意識しながら、現実で使える形へ近づけることが重要です。
なぜ現実ではなくシミュレーションで学習するのか
強化学習では、AIが行動を選び、その結果に応じて報酬やペナルティを受け取り、よりよい行動を学んでいきます。ゲームのような仮想環境なら何度失敗しても大きな問題はありませんが、現実の機械ではそうはいきません。
自動運転を例にすると、急な飛び出し、濃霧、豪雨、夜間の視界不良、複雑な交差点など、学習させたい状況は数多くあります。しかし、それらを実車で繰り返し試すのは危険です。事故のリスクがあり、テストコースや車両の準備にも大きな費用がかかります。
シミュレーションを使うと、現実では危険な状況や発生頻度の低い状況を、条件を変えながら繰り返し作れます。AIにとって必要な経験を効率よく集められるため、現実での実験回数を減らしながら、モデルの改善を進められます。
sim2realの基本的な流れ
sim2realの開発は、多くの場合、次のような流れで進みます。まず、コンピューター上にロボットや車両、道路、工場、天候などを再現したシミュレーション環境を作ります。次に、その中でAIモデルや制御アルゴリズムを学習させ、さまざまな条件で性能を確認します。
シミュレーションで一定の成果が出たら、いきなり本番環境に投入するのではなく、限定された現実環境で小さく試します。たとえば、低速で動かす、狭い範囲だけを走らせる、人が停止できる状態で検証する、といった段階的な確認を行います。
最後に、現実で得られたデータを使ってシミュレーションやモデルを修正します。この往復を繰り返すことで、仮想環境と現実の差を少しずつ縮めていきます。

シミュレーション活用の主な利点
sim2realでシミュレーションを活用する利点は、単に「安く試せる」ことだけではありません。安全性、効率、データの多様性、改善速度の面で大きな効果があります。
| 現実で直接学習する場合の問題 | シミュレーションで補える点 | 期待できる効果 |
|---|---|---|
| 機械の故障や事故の危険がある | 危険な操作を仮想環境で再現できる | 安全を確保しながら試行回数を増やせる |
| 悪天候や低頻度の状況を集めにくい | 雨、霧、夜間、障害物などを条件設定できる | まれな状況への対応力を高めやすい |
| 実験設備や人員に費用がかかる | 仮想環境で大量の試行を自動化できる | 開発期間とコストを抑えやすい |
| 失敗時の原因分析に時間がかかる | センサー値や状態を細かく記録できる | 弱点や改善点を見つけやすい |
たとえば自動運転では、現実の道路で事故寸前の場面を何度も再現することはできません。しかし、シミュレーションなら同じ状況を何度も再生し、車両速度、歩行者の動き、路面状態などを変えて検証できます。これは、安全なシステムを作るうえで大きな利点です。

sim-to-real gapが起きる理由
sim2realで最も大きな課題になるのが、sim-to-real gapです。これは、シミュレーション環境と現実世界の違いによって、仮想環境ではうまく動いたモデルが現実では期待通りに動かない問題を指します。
原因はさまざまです。物体の重さや摩擦を完全に再現するのは難しく、ロボットの関節にはわずかな遅れやずれがあります。カメラやセンサーにはノイズが入り、照明や反射も時間や場所によって変化します。現実の床は完全に平らではなく、部品の個体差もあります。
このような小さな差は、人間から見ると些細に思えるかもしれません。しかし、AIモデルや制御アルゴリズムにとっては性能を大きく下げる原因になります。特にロボット制御では、数ミリのずれやわずかな摩擦差が、物体をつかめない、倒してしまう、想定外の動きをする、といった結果につながります。
ギャップを小さくする代表的な方法
sim-to-real gapを完全になくすことは簡単ではありません。そのため、実務や研究では、複数の方法を組み合わせて差を小さくしていきます。
1つ目は、シミュレーションの再現性を高める方法です。物体の形状、重さ、摩擦、重力、光の反射、センサーの特性などをできるだけ現実に近づけます。精度の高いデジタルツインを作る考え方も、この方向に近いものです。
2つ目は、現実データを使ってシミュレーションを補正する方法です。実機の動きとシミュレーション上の動きを比べ、ずれが大きい部分を調整します。ロボットのアームが現実では少し遅れて動くなら、その遅れをシミュレーション側にも反映させます。
3つ目は、ドメインランダム化です。これは、シミュレーション内の色、光、摩擦、重さ、位置、ノイズなどをあえてランダムに変えながら学習する方法です。最初からさまざまな条件に慣れさせることで、現実のばらつきにも対応しやすくします。
4つ目は、現実環境での段階的な検証です。シミュレーションで学んだモデルをいきなり本番投入するのではなく、安全な速度、限定された範囲、人間が監視できる環境でテストし、問題があれば戻って調整します。sim2realは現実検証を省く技術ではなく、現実検証をより安全で効率的にするための考え方です。

sim2realの応用例
sim2realは、現実での試行錯誤が高価、危険、または時間のかかる分野で特に役立ちます。代表的な応用先には、製造ロボット、自動運転、ドローン制御、医療訓練などがあります。

| 分野 | sim2realの使いどころ | 現実世界での効果 |
|---|---|---|
| 製造業のロボット | 部品の組み立て、溶接、搬送、把持動作を仮想環境で学習する | 作業精度や速度の向上、安全確認、新しい作業への導入時間短縮 |
| 自動運転 | 悪天候、交通量の変化、事故直前の状況などを再現する | 危険なケースを安全に検証し、信頼性を高める |
| ドローン制御 | 風、雨、障害物、着陸地点の違いをシミュレーションする | 安定した飛行制御や自律移動の開発を進めやすい |
| 医療・訓練 | 手術支援ロボットや訓練用シミュレータで手技を検証する | 人へのリスクを抑えながら手順や支援システムを評価できる |
特にロボット分野では、現実のロボットを長時間動かし続けると消耗や故障が起きます。シミュレーションで候補となる動作を絞り込み、最後に現実で確認する流れにすると、開発の負担を減らしながら精度を上げられます。
使うときの注意点と倫理的な配慮
sim2realは便利な考え方ですが、シミュレーションで良い結果が出たことだけを根拠に、現実で安全だと判断してはいけません。特に自動運転、医療、産業ロボットのように人命や身体に関わる分野では、段階的な検証、安全基準、緊急停止の仕組み、責任範囲の明確化が必要です。
また、シミュレーションや実機テストで現実データを使う場合は、個人情報やプライバシーにも注意が必要です。自動運転で道路映像を使う場合、歩行者や車両の情報が含まれることがあります。医療分野では、患者に関するデータの扱いが特に重要です。
技術的には、シミュレーションで高いスコアを出すことだけに最適化してしまう危険もあります。現実の目的、安全性、説明可能性、運用時の監視体制まで含めて考えることが、責任あるsim2real活用につながります。
今後の展望
今後、シミュレーション技術、センサー、物理エンジン、生成AI、ロボット基盤モデルなどが発展すると、sim2realの重要性はさらに高まると考えられます。現実のデータをより正確に取り込み、仮想環境で多様な条件を作り、現実での検証結果を再び学習に戻す流れが進むためです。
ただし、どれだけシミュレーションが高精度になっても、現実世界の複雑さを完全に再現することは難しいままです。そのため、今後も「仮想環境で大量に試すこと」と「現実で慎重に確認すること」の組み合わせが重要になります。
sim2realは、AIを実験室や画面の中だけでなく、現実の機械や社会システムへつなげるための橋渡しです。ロボット、自動運転、ドローン、医療、物流などの分野で、より安全で効率的なAI活用を支える基盤として期待されています。
まとめ
sim2realとは、シミュレーション環境で学習したAIモデルや制御方策を現実世界へ移すための考え方です。現実で直接試行錯誤するよりも、安全に多くの条件を試せるため、強化学習、ロボット制御、自動運転などで活用されています。
一方で、シミュレーションと現実の差であるsim-to-real gapは大きな課題です。物理モデルの精度向上、現実データによる補正、ドメインランダム化、段階的な実機検証を組み合わせることで、現実で使いやすいモデルへ近づけていきます。
初心者が理解するときは、sim2realを「現実実験をなくす方法」ではなく、「現実実験をより安全で効率的にする方法」と捉えると分かりやすいでしょう。
更新履歴
| 日付 | 内容 |
|---|---|
| 2025年1月31日 | 初回公開 |
| 2026年5月9日 | sim-to-real gapと応用例を補い、現実検証の注意点まで追記 |