
残差強化学習とは?意味・仕組み・活用例をわかりやすく解説

AIの初心者
「残差強化学習」って、普通の強化学習と何が違うんですか?言葉だけ見ると少し難しそうです。

AI専門家
残差強化学習は、何もない状態からすべてを学ぶのではなく、先に用意した基本のやり方を少しずつ直していく方法だよ。スポーツでいえば、まったくの初心者に一から教えるより、基本フォームを持っている人に細かな修正を入れる方が早い、という考え方に近いね。
AIの初心者
つまり、最初に大まかな行動方針があるから、学習の遠回りを減らせるということですか?
AI専門家
その通り。残差強化学習では、基本方針と理想的な方針の差、つまり残差を学ぶことで、ゼロから探索するより効率よく性能を高めることを目指すんだ。
残差強化学習とは。
残差強化学習とは、経験、専門家の知識、既存の制御方法、模倣学習などから作った初期方策を土台にし、最適な行動方針との差分を強化学習で学ぶ考え方です。行動方針全体を一から学ぶのではなく、足りない部分を補正するため、複雑な問題でも学習を進めやすくなります。
はじめに

強化学習は、AIが環境の中で行動し、その結果として得られる報酬を手がかりに、より良い行動を学ぶ方法です。ゲームで高得点を目指すAI、ロボットの動作制御、自動運転の判断など、試行錯誤を通じて方策を改善したい場面で使われます。
ただし、通常の強化学習には、学習に多くの試行回数が必要になりやすいという課題があります。選択肢が多い問題では、AIが何を試せばよいか分からず、無駄な探索が増えます。報酬がなかなか得られない問題では、どの行動が良かったのかも判断しにくくなります。
そこで使われる考え方の一つが、残差強化学習は既存の方策を出発点にし、そこからの修正量を学ぶ手法だという見方です。最初から完璧な方策を用意する必要はありません。ある程度使える方策を土台にし、その弱点や不足分を強化学習で補っていくことが重要です。
残差強化学習とは
残差強化学習では、まず「初期方策」を用意します。方策とは、ある状態でどの行動を選ぶかを決めるルールのことです。たとえば、ロボットアームなら「対象物がこの位置にあるとき、関節をどの方向へ動かすか」という判断ルールが方策にあたります。
初期方策は、人間が設計した制御器、専門家の知識、シミュレーションで学習したモデル、模倣学習で得た行動などから作れます。この初期方策が完璧でなくても、ある程度正しい方向へ進めるなら、学習の出発点として役立ちます。
次に、初期方策とより良い方策との差を学習します。この差が「残差」です。残差強化学習の中心は、最適な行動方針そのものではなく、既存方策に何を足せば改善するかを学ぶ点にあります。地図で目的地のおおよその道筋が分かっているなら、全体を探し直すより、間違っている曲がり角だけを直す方が早い、というイメージです。
このため、残差強化学習は、完全にゼロから学習するよりも初期性能を確保しやすく、探索の範囲も絞りやすくなります。特に、物理制御のように失敗のコストが高い分野では、最初から危険な行動を大量に試すより、既存の安定した制御を残しながら改善する方が現実的です。
仕組みを数式のイメージで見る
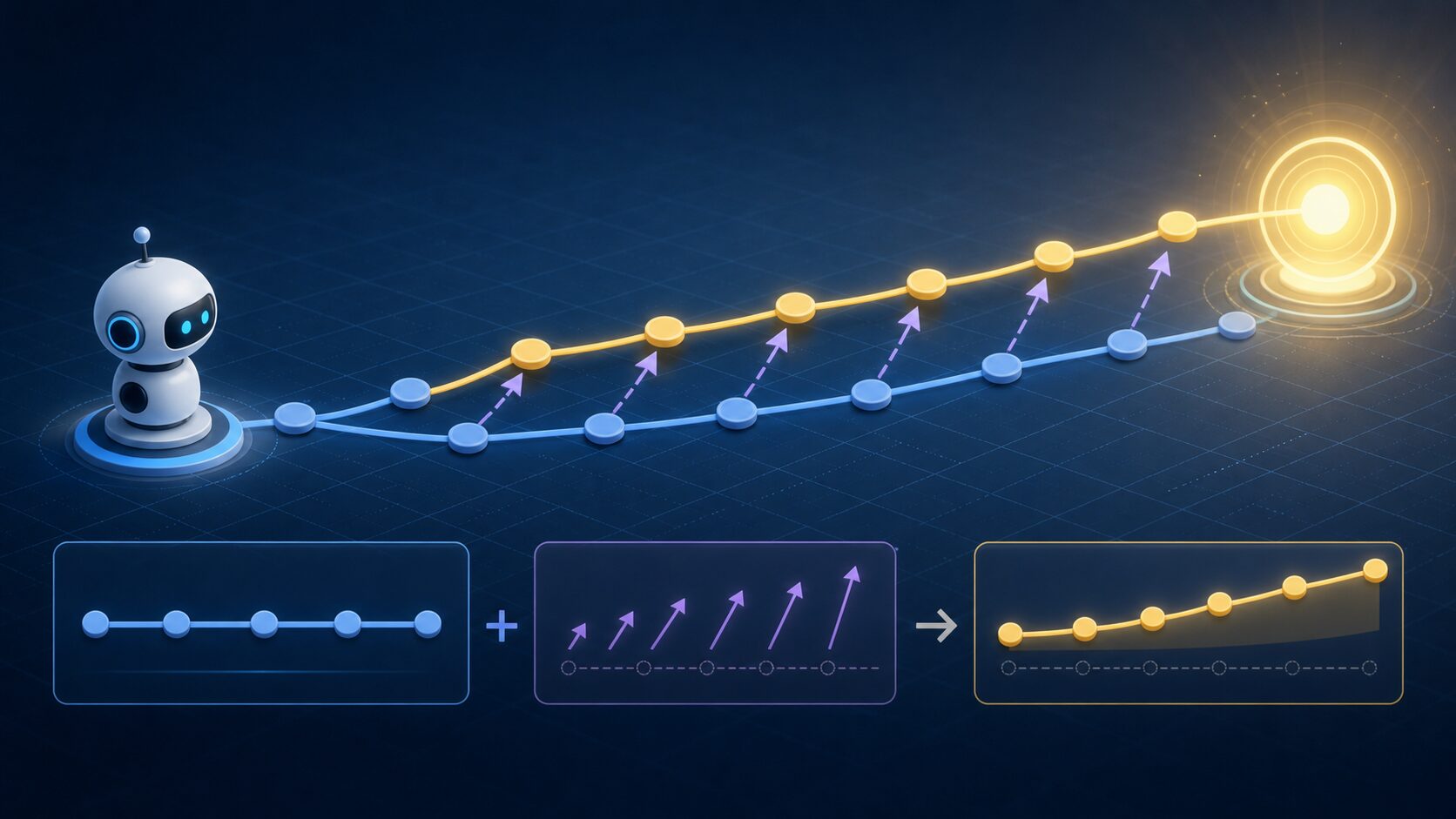
残差強化学習の考え方は、簡単には「基本の行動」と「補正の行動」を足し合わせる形で理解できます。たとえば、ある状態 \(s\) に対して、初期方策が出す行動を \(\pi_0(s)\)、残差を学ぶ方策が出す補正を \(\Delta \pi(s)\) とすると、最終的な行動方策は次のように考えられます。
\(\pi(s) = \pi_0(s) + \Delta \pi(s)\)ここで \(\pi_0(s)\) は土台となる方策、\(\Delta \pi(s)\) は強化学習によって学ぶ修正分、\(\pi(s)\) は実際に使う方策です。厳密な実装では、行動空間やアルゴリズムによって表現方法は変わりますが、初心者はまず「基本方策に補正を足す」と捉えると理解しやすくなります。
この構成にすると、学習器は最初からすべての行動を発見する必要がありません。基本方策でうまくいく部分はそのまま使い、うまくいかない部分だけを補正します。結果として、報酬を得るまでの試行錯誤を減らし、学習の安定性を高めやすくなります。
通常の強化学習との違い
通常の強化学習は、初期状態ではほとんど何も知らない状態から行動を試し、報酬の高い行動を少しずつ見つけていきます。一方、残差強化学習は、最初に使える方策を持っているため、探索の出発点が異なります。
通常の強化学習が「答え全体を探す」方法だとすれば、残差強化学習は「既にある答えを修正する」方法です。もちろん、初期方策が悪ければ修正量は大きくなりますが、初期方策が一定の品質を持っていれば、探索の無駄を減らせます。
| 観点 | 通常の強化学習 | 残差強化学習 |
|---|---|---|
| 出発点 | 知識が少ない状態から探索する | 初期方策を土台にする |
| 学ぶ対象 | 方策全体 | 初期方策からの補正分 |
| 利点 | 事前知識が少なくても始められる | 学習を効率化しやすく、初期性能も確保しやすい |
| 注意点 | 試行錯誤が多くなりやすい | 初期方策の質に影響される |
この違いは、学習データや試行回数に制約がある場面で大きく効いてきます。ロボットを現実環境で学習させる場合、無数の失敗を繰り返すと機械の破損や安全上の問題につながります。残差強化学習は、既存の安定した動きを残しながら改善するため、こうした制約のある問題と相性が良いと考えられます。
初期方策が重要になる理由
残差強化学習の成否は、初期方策の質に大きく左右されます。初期方策が最適方策に近ければ、学ぶべき残差は小さくなります。反対に、初期方策が大きく外れていると、残差が大きくなり、結局は難しい探索問題に戻ってしまいます。
初期方策を作る方法にはいくつかあります。専門家が設計したルールを使う方法、既存の制御理論に基づく制御器を使う方法、人間の操作データを模倣学習で学ぶ方法、シミュレーションで事前に学習する方法などです。どの方法が良いかは、対象とする問題、利用できるデータ、安全性の要求によって変わります。
| 初期方策の作り方 | 向いている場面 | 注意点 |
|---|---|---|
| 専門家の知識 | ルールや経験則が明確な問題 | 専門家の設計範囲を超える状況に弱いことがある |
| 模倣学習 | 人間や既存システムの行動データがある問題 | 教師データにない状況では性能が落ちる可能性がある |
| 既存の制御器 | ロボットや物理制御のように安定性が重要な問題 | 制御器の前提と実環境がずれると補正が大きくなる |
| 事前学習済み方策 | シミュレーションや過去タスクを使える問題 | 学習環境と本番環境の差を考慮する必要がある |
初心者が学ぶときは、「良い初期方策があるほど残差は小さくなり、学習しやすくなる」と押さえておくと十分です。残差強化学習は魔法のようにどんな問題でも速くする方法ではなく、使える土台をどう用意するかが重要な設計ポイントになります。
残差強化学習が向いている場面
残差強化学習は、既にある程度の行動方針が存在し、それをさらに改善したい場面に向いています。たとえば、既存のロボット制御器は安定して動くものの、細かな精度や柔軟性が不足している場合、残差強化学習で補正分を学ぶことで性能向上を狙えます。
また、状態空間や行動空間が大きい問題にも適しています。状態空間とはAIが観測しうる状況の広さ、行動空間とは選べる行動の種類の多さです。これらが大きいと、通常の強化学習では探索が膨大になります。初期方策が探索の方向を示してくれれば、学習は現実的な範囲に近づきます。
一方で、初期方策を用意できない問題、初期方策が誤った方向へ強く誘導してしまう問題、探索の自由度を大きく残したい問題では、残差強化学習が常に最適とは限りません。使いどころを見極めるには、既存方策が「改善の土台」として信頼できるかを確認する必要があります。
応用例

残差強化学習は、ロボット制御、ゲームAI、自動運転など、複雑な行動選択が必要な分野で応用が期待されています。どの分野でも共通するのは、完全にゼロから学ぶより、既にある知識や制御方法を活かした方が効率的になりやすい点です。
ロボット制御では、従来の制御器や人間のデモ操作を初期方策にできます。残差強化学習は、その基本動作を壊さずに、対象物のつかみ方、移動の滑らかさ、外乱への対応などを補正します。精密な組み立てや、環境が少しずつ変わる作業では、この補正の考え方が役立ちます。
ゲームAIでは、ルールベースの戦略や過去のプレイデータを初期方策として使えます。そこから強化学習で残差を学ぶことで、基本戦略を維持しながら、相手の行動に応じた高度な判断を身につけることができます。
自動運転では、シミュレーションで学習した方策や既存の制御ロジックを土台にし、現実世界で生じる細かな差を補正する考え方が重要になります。天候、路面、周囲の車両や歩行者の動きなど、現実環境にはシミュレーションだけでは表しきれない変化があるためです。
| 分野 | 初期方策の例 | 残差で改善したい点 |
|---|---|---|
| ロボット制御 | 既存制御器、人間の操作データ | 精度、滑らかさ、環境変化への対応 |
| ゲームAI | ルールベース戦略、過去のプレイ | 状況判断、相手への適応、戦略の洗練 |
| 自動運転 | シミュレーションで学習した方策 | 現実環境との差、予期しない状況への対応 |
学ぶときの注意点
残差強化学習を理解するときは、まず「効率的に学べる可能性がある一方で、初期方策への依存がある」と考えることが大切です。初期方策が良い方向を示していれば学習は速くなりますが、初期方策が不適切だと、補正だけでは十分に改善できない場合があります。
また、残差を小さく学ぶ設計にしすぎると、初期方策から大きく離れた有効な行動を見つけにくくなることがあります。これは、安定性と探索の自由度のバランスの問題です。安全性を重視する場面では保守的な補正が望ましい一方、新しい戦略を発見したい場面では探索範囲を広げる必要があります。
報酬設計にも注意が必要です。強化学習では報酬の与え方が学習結果を左右します。残差強化学習でも、何を改善したいのか、どの行動を避けたいのかを報酬に反映できていなければ、期待した補正を学べません。特に現実環境へ適用する場合は、シミュレーションで良かった方策がそのまま通用するとは限らない点も確認が必要です。
今後の展望

今後の残差強化学習では、より良い初期方策をどう作るかが重要になります。専門家が毎回設計するのではなく、過去のタスク、シミュレーション、模倣学習、事前学習済みモデルを使って、対象に合う初期方策を自動的に用意できれば、適用範囲は広がります。
深層学習との組み合わせも大きなテーマです。深層学習は画像、センサー情報、複雑な状態表現を扱う力があります。これを残差強化学習と組み合わせることで、ロボットがカメラ映像を見ながら動作を補正したり、自動運転システムが複雑な道路状況に応じて判断を調整したりする可能性があります。
ただし、実用化には安全性、説明可能性、シミュレーションと現実の差、計算コストといった課題もあります。残差強化学習は有望な手法ですが、単独で万能というより、制御理論、模倣学習、深層強化学習、シミュレーション技術と組み合わせて使われることが多くなるでしょう。
まとめ
残差強化学習は、初期方策を土台にして、最適方策との差分である残差を強化学習で学ぶ手法です。通常の強化学習が方策全体を探索するのに対し、残差強化学習は既存方策の不足分を補正するため、学習を効率化しやすいという特徴があります。
特に、ロボット制御や自動運転のように既存の制御方法があり、かつ現実環境での試行錯誤にコストがかかる問題では有効です。一方で、初期方策の質、報酬設計、探索範囲の設定によって結果が大きく変わるため、使いどころを見極めることが欠かせません。
初心者はまず、残差強化学習は「ゼロから学ぶ」のではなく「既にある方策を賢く直す」強化学習だと押さえておくと、仕組みや応用例を理解しやすくなります。
更新履歴
| 日付 | 内容 |
|---|---|
| 2025年2月1日 | 初回公開 |
| 2026年5月24日 | 初期方策と残差の関係、応用時の注意点を補強 |