モラベックのパラドックスとは?人間とAIの得意不得意が逆になる理由

AIの初心者
「モラベックのパラドックス」って、どういう意味ですか?

AI専門家
簡単にいうと、人間には自然にできることがAIやコンピュータには難しく、人間が苦労する計算や論理処理はコンピュータのほうが得意、という逆説です。たとえば、公園を走ることは人間には簡単でも、ロボットに同じように走らせるのはとても難しいのです。
AIの初心者
なるほど。人間は小さいころから体を動かしたり、物を見分けたりすることを自然に覚えますが、コンピュータにはそれが簡単ではないのですね。
AI専門家
その通りです。人間が無意識にこなしている知覚や運動には、実は非常に複雑な処理が含まれています。この意外な得意不得意の差が、モラベックのパラドックスです。
モラベックのパラドックスとは。
モラベックのパラドックスとは、人間にとって簡単に見える動作や認識ほどAIやロボットには難しく、人間にとって難しい計算や記号処理ほどコンピュータには扱いやすい、という人工知能に関する逆説です。
モラベックのパラドックスとは

モラベックのパラドックスは、人工知能やロボット工学を理解するうえで重要な考え方です。要点は、人間にとって簡単なことと、コンピュータにとって簡単なことは一致しないという点にあります。
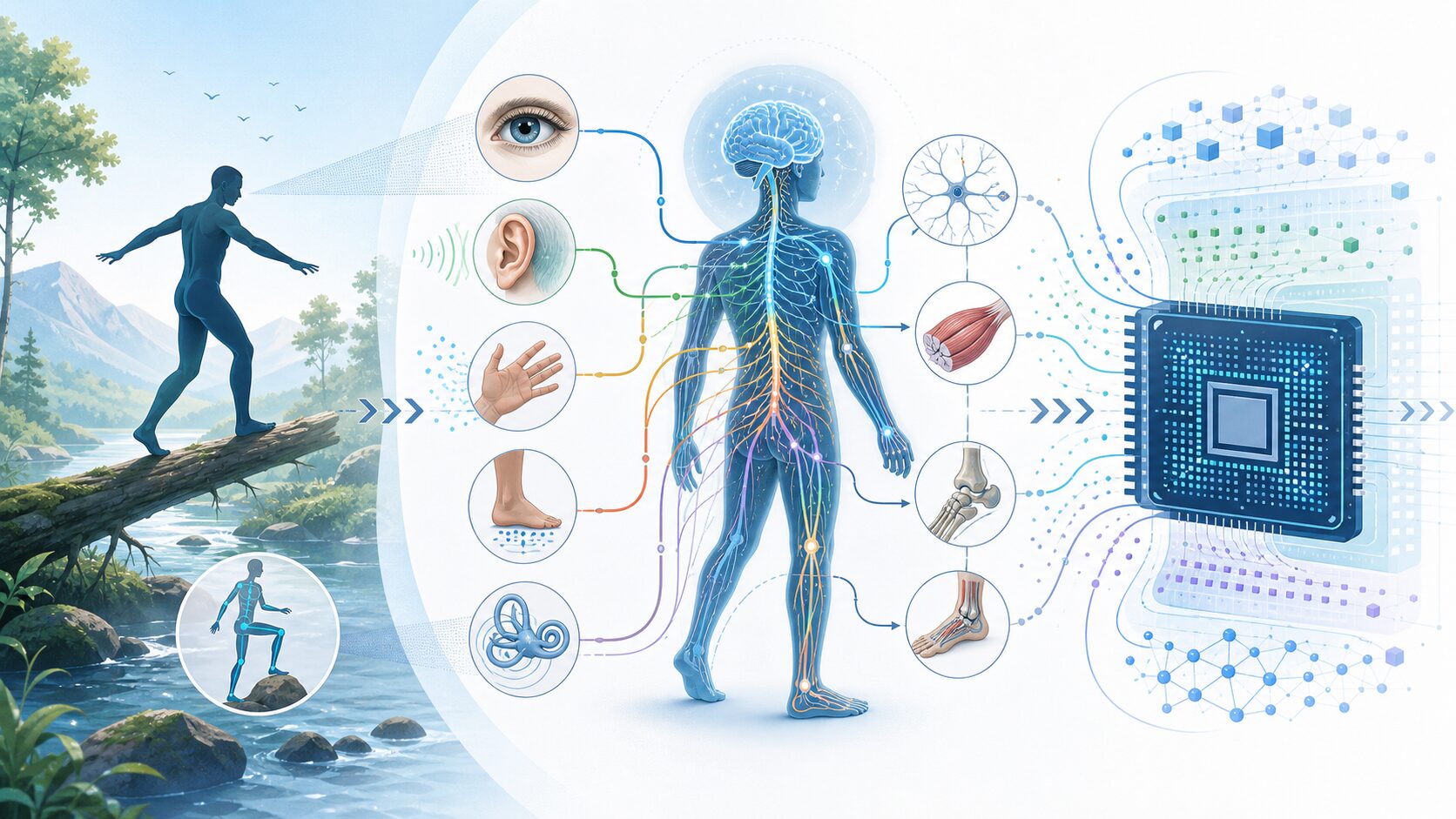
人間は歩く、物をつかむ、表情を読み取る、混み合った場所をぶつからずに進むといった行動を、ほとんど意識せずに行えます。しかし、これらを機械に実行させようとすると、視覚情報の認識、距離の推定、バランス制御、力加減、周囲の変化への対応など、多くの処理が必要になります。
一方で、複雑な数式を計算する、大量のデータを並べ替える、膨大な候補の中から最適な手を探索するといった処理は、人間には負担が大きい作業です。しかしコンピュータは、明確なルールとデータが与えられれば高速かつ正確に処理できます。
つまりモラベックのパラドックスは、「AIは賢いから何でも人間より得意」と考えるのではなく、知能には複数の種類があり、得意分野が異なることを示しています。
人間と機械で得意分野が逆になる具体例

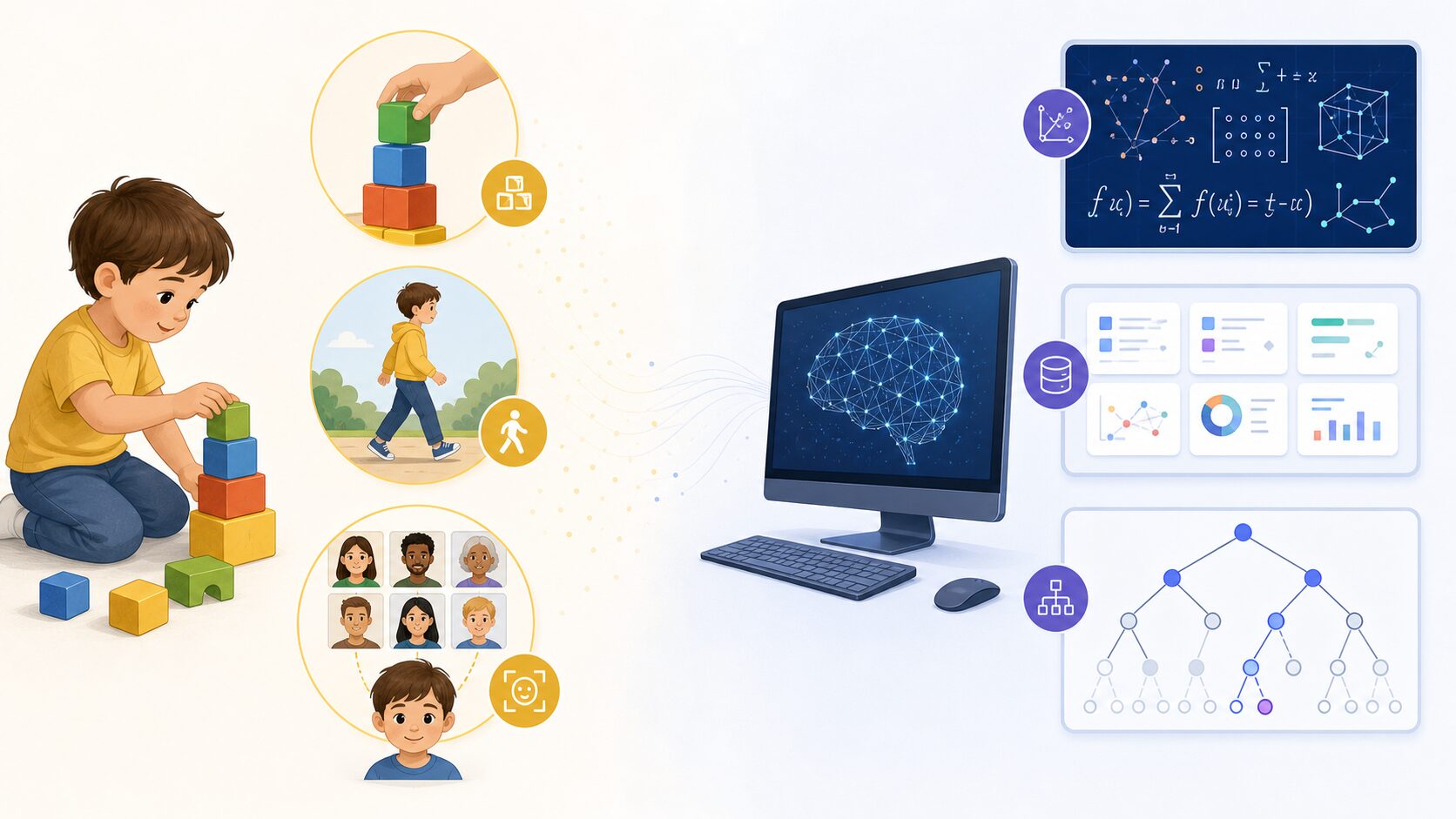
代表的な例は、積み木を積む作業です。小さな子どもは、積み木の形や重さを大まかに感じ取り、倒れそうなら角度や置き方を自然に調整できます。ところがロボットには、物体の位置、形状、摩擦、重心、手先の力加減などを細かく判断させなければなりません。
顔の認識も同じです。人間は家族や友人の顔を一瞬で見分けます。少し表情が変わっても、照明が暗くても、横顔でも、かなり柔軟に判断できます。AIによる画像認識は大きく進歩しましたが、現実には角度、影、マスク、年齢変化、背景の違いなどが精度に影響します。
反対に、計算や大量データの処理はコンピュータが得意です。人間が時間をかけて解く計算問題や、手作業では追いきれないデータの分類も、コンピュータなら短時間で処理できます。チェスや将棋のようなゲームでAIが高い性能を発揮するのも、多数の候補を高速に探索できるためです。
| タスク | 人間 | AI・コンピュータ |
|---|---|---|
| 歩く・走る | 自然にできる | バランス制御や環境認識が難しい |
| 物をつかむ | 形や重さに応じて調整できる | 位置、力、摩擦、重心の判断が必要 |
| 顔や状況の認識 | 文脈込みで柔軟に判断しやすい | 条件の変化に影響されやすい |
| 複雑な計算 | 学習と時間が必要 | 高速かつ正確に処理しやすい |
| 大量データの集計 | 手作業では負担が大きい | ルールが明確なら得意 |
なぜ人間に簡単なことがAIには難しいのか

理由の一つは、人間の感覚運動能力が長い進化の中で磨かれてきたことにあります。私たちは、目で見た情報をもとに距離を判断し、足元の凹凸に合わせて姿勢を変え、手で触れた感覚から力加減を調整します。これらは一見単純ですが、身体全体を使った高度な情報処理です。
しかも、この処理の多くは無意識に行われます。歩くたびに「右足を何センチ前に出すか」「体重をどの角度で移すか」と計算しているわけではありません。脳、神経、筋肉、感覚器官が連携し、経験から学んだ調整を瞬時に行っています。
一方、数学や論理記号を使った推論は、人類の歴史の中では比較的新しい能力です。読み書きや計算は教育によって身につけるもので、紙、記号、そろばん、電卓、コンピュータなどの道具と相性がよい領域です。そのため、明確なルールに分解できる処理は機械に載せやすくなります。
モラベックのパラドックスが示す「難しさ」は、単に処理量の大小だけではありません。現実世界の曖昧さ、変化、例外に対応する難しさが大きく関係しています。机上の計算は条件を固定できますが、現実の床、光、物体、人の動きは常に変化します。
現在のAIやロボット開発で重要になる理由
近年のAIは、文章生成、画像認識、翻訳、データ分析などで大きく進歩しています。しかし、デジタル空間で高い能力を示すことと、現実世界で安全に動くことは別の課題です。ここでモラベックのパラドックスが重要になります。
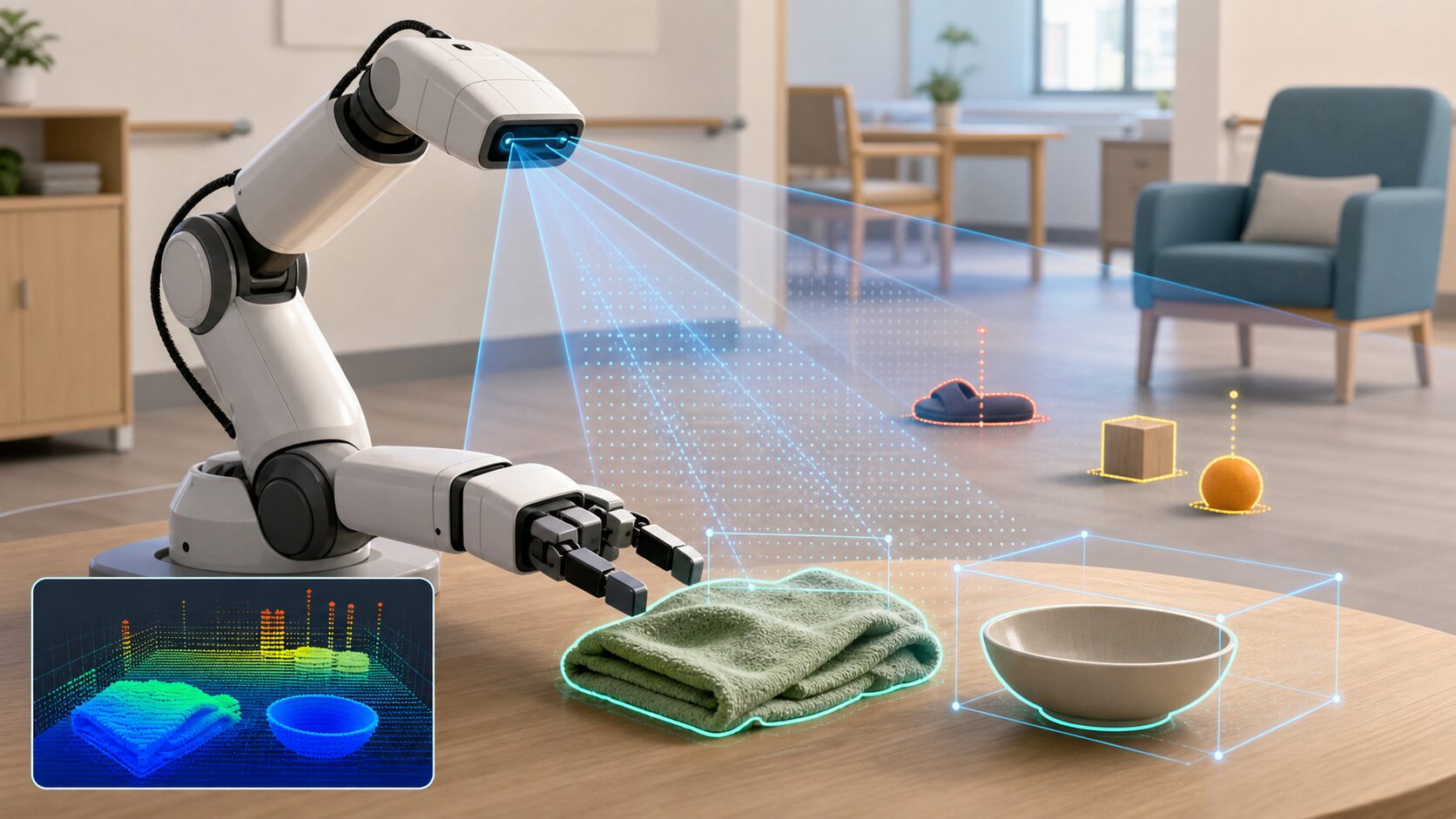
たとえば介護ロボットに人を支えさせる場合、相手の姿勢、体重移動、痛みの有無、周囲の障害物を判断する必要があります。家事ロボットなら、食器、衣類、食品、家具など形も材質も異なる物を扱わなければなりません。災害現場のロボットなら、崩れた足場や見えにくい空間で判断する必要があります。
これらの場面では、計算能力だけでなく、センサー、ロボットアーム、制御技術、学習データ、安全設計が組み合わさります。AIが答えを出せても、ロボットの手が適切な力で動かなければ作業は成功しません。
このため、モラベックのパラドックスはAI開発の限界を悲観するための言葉ではなく、どの能力をどう補えば社会で使えるAIになるのかを考える指針として役立ちます。
関連概念との違いと誤解しやすい点
モラベックのパラドックスは、「AIは人間より賢いか」という単純な優劣の話ではありません。人間とAIを一つの物差しで比べるのではなく、知覚、運動、推論、記憶、探索、学習などの能力を分けて考える必要があります。
また、「人間に簡単なことはAIに絶対できない」という意味でもありません。画像認識、音声認識、ロボット制御は進歩しており、特定条件では人間に近い、あるいは人間を超える性能を示すことがあります。ただし、条件が変わる現実環境で安定して動くには、まだ多くの工夫が必要です。
生成AIについて考えるときも、この視点は役立ちます。文章や画像を作るAIが高度に見えても、それは現実世界を人間と同じように身体で経験していることを意味しません。AIの出力を使うときは、得意な処理と苦手な判断を分けて確認することが大切です。
| 誤解 | 実際の見方 |
|---|---|
| AIは計算が得意なので何でも得意 | 現実世界の認識や身体制御は別の難しさがある |
| 人間に簡単なことは技術的にも簡単 | 無意識の行動ほど複雑な処理を含むことがある |
| ロボットはプログラムすればすぐ動ける | センサー、制御、安全性、環境変化への対応が必要 |
モラベックのパラドックスから見えるAIとの付き合い方
モラベックのパラドックスを知ると、AIの活用では「何を任せるか」を見極めやすくなります。大量の情報を整理する、候補を比較する、計算する、パターンを探すといった作業はAIやコンピュータの力を借りやすい領域です。
一方で、現場の空気を読む、予期しない状況に対応する、人の表情や身体の反応を見ながら細かく調整する、といった作業では人間の経験が重要です。特に医療、介護、教育、接客、安全管理のような分野では、AIの出力をそのまま信じるのではなく、人間が状況を確認する設計が欠かせません。
重要なのは、人間とAIのどちらが上かを決めることではありません。人間は柔軟な知覚や文脈判断に強く、AIは計算、検索、分類、反復処理に強いという違いを理解し、互いの長所を組み合わせることです。
まとめ
モラベックのパラドックスとは、人間にとって簡単な感覚運動や状況判断がAIには難しく、人間にとって難しい計算や論理処理がコンピュータには得意であるという逆説です。
歩く、物をつかむ、顔を見分けるといった行動は、私たちには自然に感じられます。しかしその裏側では、視覚、触覚、筋肉、バランス、経験にもとづく判断が複雑に連携しています。これを機械で再現するには、高度な認識技術と制御技術が必要です。
一方、計算やデータ処理のようにルール化しやすい作業はコンピュータが得意です。この違いを理解すると、AIを過大評価せず、同時に過小評価もしない現実的な見方ができます。モラベックのパラドックスは、AI時代に人間と機械の役割分担を考えるための基本的な視点です。
更新履歴
| 日付 | 内容 |
|---|---|
| 2025年2月1日 | 初回公開 |
| 2026年5月24日 | 具体例と開発上の論点を補い、AIの得意不得意を比較しやすく調整 |